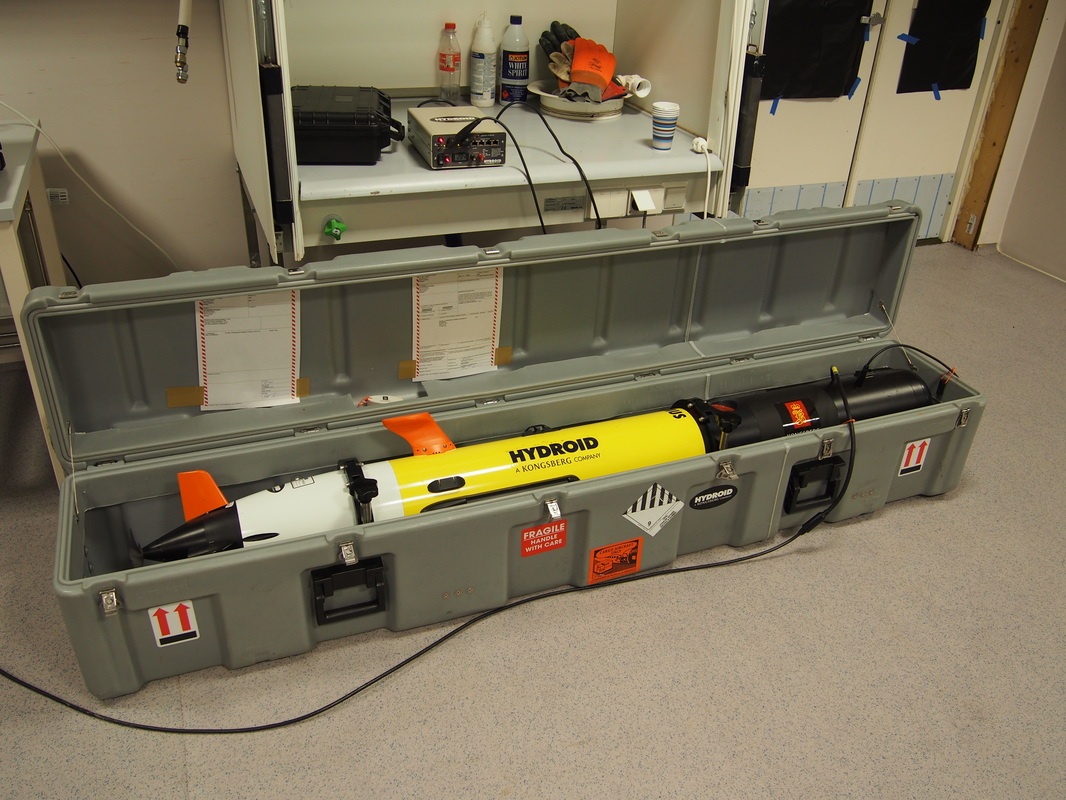
Today we had some introduction to another new friend! The Automated Underwater Vehicle (AUV) arrived yesterday on the ship and has spent all night on charge so that we can run a test mission today! There’s a lot of cool tech on this little baby, which all the guys insist on referring to as a woman because they can be occasionally temperamental and refuse to come home (which I think applies just as well to men), but in this case I think it’s a pretty cool compliment as this baby is sleek, powerful and independent! Just have a look!
We had to test every element of the AUV before putting it into water. Mostly because putting something autonomous into water when something doesn’t work is going to end in tears. Luckily for us pretty much everything did work! Yay! Happy Panda. This is the screen where we do most of the tests, and even cooler can actually control the machine when it’s in the water (to an extent).
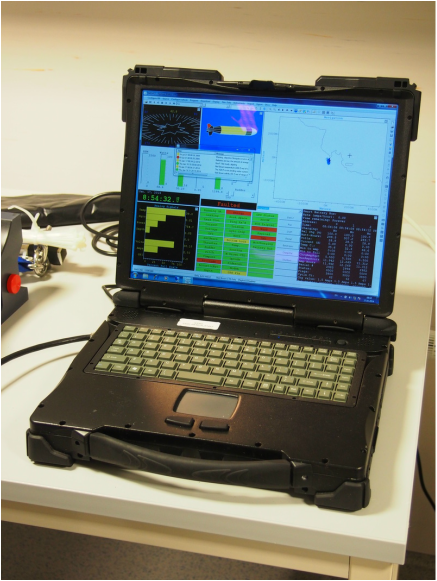
So we did things like dry test the fins and propeller, but only for a short period of time. Because everything is set up to run underwater it can easily overheat when tested above land.

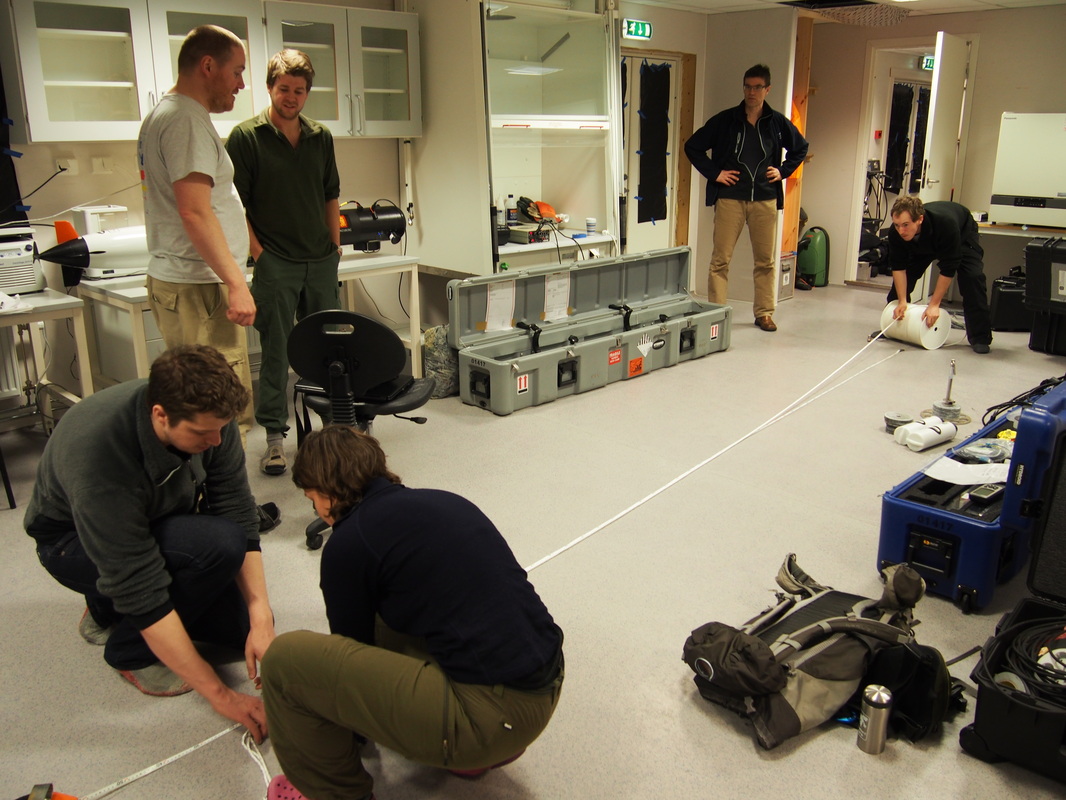
And just for reference this is the kinds of boxes that everything comes in. There is lots and lots and lots of walking back and forth with boxes.

Following successful testing we set up lines to be used to moor some sensors which are going to be out for the next week or so and will give an extra location point to the AUV when it’s doing it’s missions. This involved a lot of walking back and forth with measuring tapes, some duct tape (real engineering now!) and a bit of splicing. Practical stuff!

After all the lines were made and tested we had the enviable job of heading out onto the water, in some sexy survival suits, to deploy our sensors. It was cold, it snowed, it was awesome. We found all the locations we had to get to and no one fell in (well the sensors did, but that was all part of the master plan!).

Photo credit to Seb

Photo credit to Seb
Following all this success we had to set up a plan for the AUV to follow when it went out on a mission. This means having a look at some maps to see what hasn’t been looked at too closely before and coming up with a plan to have a look at it. We stuck to a short plan today, along the lines of 20 minutes, just to see if everything is working.

And finally we got to head out to see if it was going to work! The excitement, the tension builds! It’s all about being cool from here on in. Although, I will admit, I got entirely distracted from the mission by about 6 birds which were out feeing off the pier. They were Little Auks and they were happy as little larks and were going for it! It was incredibly fun to see. You’ll have to trust me that the little blob is a bird.
And then finally we got to deploy! Down the slippery walk way we go!

And there she goes into the water.
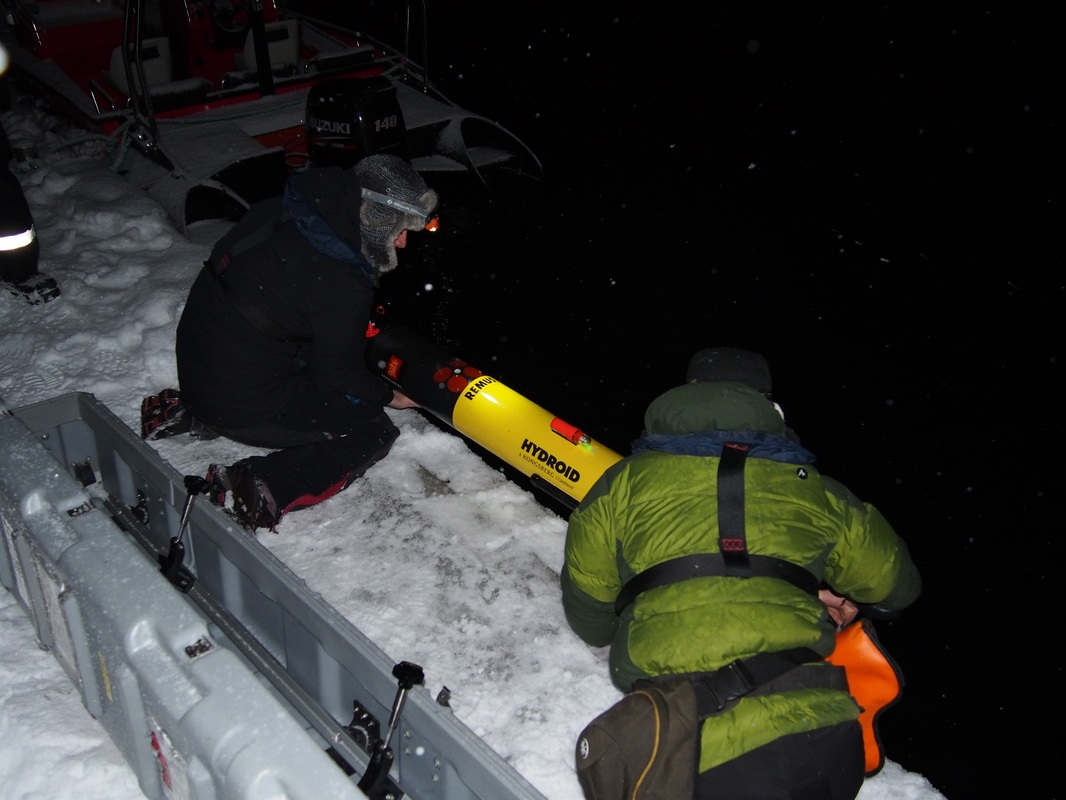
We had to hold her there for a bit just to check that all the sensors were still functional in the water and that she floated (quite an important element).

And then off off off into the wilderness she headed! It was just as she was returning that we were called off for a whole class meeting, although apparently everything went incredibly well and we’re looking forward to having a look at the data tomorrow!

In other news we’ve had some funny weather up here, it’s been snowing like there’s no tomorrow and occasionally above zero. This has resulted in some pretty serious ice on the runway which meant that the media TV2 (a Norsk TV channel) were unable to fly in. Somewhat more entertainingly this also means that the French radio people are also stuck here in Ny Ålesund. Apparently the cosmopolitan journalists are somewhat less than enthusiastic about this. But there you go, it’s life, there’s always the possibility of getting snowed in/out and you have to be psyched up for it!
 RSS Feed
RSS Feed
